NVIDIA Isaac GR00T : quand la Silicon Valley veut équiper l’humanité de robots open source

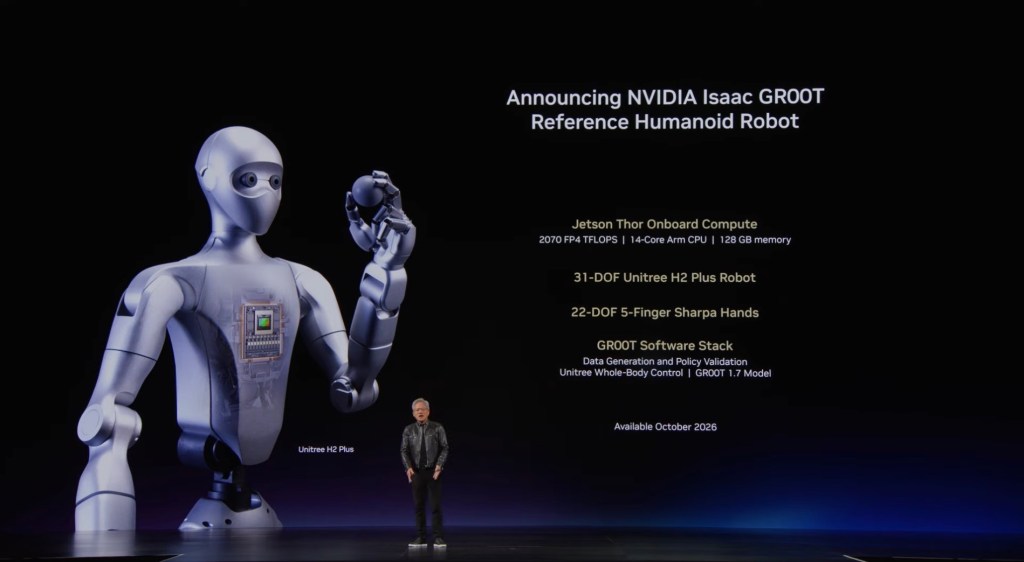
Annoncé lors du GTC Taipei le 31 mai 2026, le NVIDIA Isaac GR00T Reference Humanoid Robot représente une initiative ambitieuse : mettre entre les mains des chercheurs un robot humanoïde complet, documenté et reposant sur une pile logicielle ouverte. NVIDIA, qui depuis quelques années s’impose aussi bien dans les centres de données que dans les véhicules autonomes, s’attaque désormais frontalement à la robotique généraliste. Le message de Jensen Huang est sans ambiguïté : « Les robots humanoïdes apporteront l’IA physique aux plus grandes industries du monde, ouvrant une opportunité économique de plusieurs milliers de milliards de dollars. » Difficile de faire plus sobre comme entrée en matière.
Concrètement, ce « reference design » est l’assemblage de plusieurs briques. Le corps est fourni par Unitree, fabricant chinois déjà bien connu dans les laboratoires de robotique, avec le châssis H2 Plus : près de 1,80 mètre pour 68 kilogrammes, 31 degrés de liberté sur le corps seul. Les mains, elles, viennent de Sharpa et de ses Wave, des mains tactiles à cinq doigts qui ajoutent 22 degrés de liberté supplémentaires. Au total, le système dispose de 75 degrés de liberté, ce qui place ce robot dans une gamme de dextérité nettement supérieure à la plupart des plateformes actuelles.
Le cerveau, c’est NVIDIA qui le fournit avec le module Jetson AGX Thor T5000. Ce SoC embarque un GPU Blackwell capable de 2 070 téraflops en FP4, un processeur Arm à 14 cœurs, 128 Go de mémoire unifiée et une enveloppe thermique configurable entre 40 et 130 watts. Pour un système embarqué destiné à fonctionner en autonomie trois heures (batterie de 0,972 kWh), c’est une puissance de calcul conséquente qui permettra d’exécuter directement à bord des modèles d’inférence, sans dépendance systématique au cloud.
La perception est assurée par une caméra stéréo en tête avec un champ de vision horizontal de 140 degrés, des caméras de poignet pour la manipulation en close-range, et une centrale inertielle. La connectivité couvre Wi-Fi 6, Bluetooth 5.2, Ethernet et USB. Le bras peut exercer un couple de 120 Nm, la jambe jusqu’à 360 Nm, avec une charge utile nominale de 7 kg et un pic à 15 kg. Un arrêt d’urgence physique complète le tableau.
Ce qui distingue cette initiative des annonces marketing habituelles dans le secteur, c’est la cohérence de la pile logicielle proposée. NVIDIA ne vend pas simplement du matériel : elle embarque l’ensemble de son écosystème Isaac, de la capture de données téléopérées (Isaac Teleop) jusqu’au déploiement via Isaac ROS, en passant par Isaac Sim et Isaac Lab pour la simulation et l’entraînement. Les modèles fondateurs ouverts Isaac GR00T, disponibles sur GitHub et Hugging Face, permettent aux équipes de recherche de ne pas repartir de zéro à chaque nouveau projet. Le design est modulaire : une équipe peut adopter l’ensemble ou n’intégrer que les briques qui l’intéressent dans ses pipelines existants.
Des institutions aussi sérieuses qu’ETH Zurich, Stanford Robotics Center, UC San Diego et le Allen Institute for AI (Ai2) ont d’ores et déjà confirmé leur adoption de cette plateforme. Ce n’est pas anodin : cela valide l’attractivité d’une approche ouverte dans un secteur où la fragmentation des efforts ralentit considérablement la recherche. Marco Hutter d’ETH Zurich souligne que la plateforme permet à ses équipes de « collecter des données, tester des algorithmes et valider des comportements robotiques. » La formule est sobre mais dit l’essentiel : ce robot est conçu pour être un outil de travail, pas une démonstration de salon.
Pour les directions informatiques, quelques points méritent attention. D’abord, la question de la souveraineté des données est explicitement adressée : NVIDIA indique que les équipes conservent le contrôle de leurs données de démonstration, de leurs journaux de télémétrie et de leurs modèles entraînés. C’est un point non négligeable dans un contexte où les partenariats avec des hyperscalers tendent à créer de la dépendance. Ensuite, la disponibilité est annoncée pour fin 2026 via Unitree, ce qui en fait un horizon raisonnablement proche pour les laboratoires qui planifient leurs investissements matériels.
On notera cependant que ce robot est positionné pour la recherche académique et non pour un déploiement industriel immédiat. Le prix n’est pas communiqué, mais la combinaison d’un châssis Unitree H2 Plus, de mains Sharpa et d’un module Jetson Thor T5000 ne laisse guère d’illusions sur le ticket d’entrée. La disponibilité fin 2026 suppose également que les délais d’intégration et de qualification ne viendront pas brouiller le calendrier, ce qui, dans l’industrie robotique, est rarement garanti.
En intégrant dans une seule référence le hardware, le compute embarqué et la chaîne logicielle complète, NVIDIA tente de faire en robotique humanoïde ce que l’architecture x86 a fait pour le PC : définir un standard ouvert autour duquel une industrie peut se structurer. L’ambition est légitime. La question reste entière de savoir si les acteurs industriels, qui ont leurs propres investissements dans des plateformes propriétaires, joueront le jeu, ou si ce « reference design » restera un outil académique de haute qualité.
Pour plus d’infos : Isaac GR00T open development platform : https://developer.nvidia.com/isaac/gr00t
Nous consacrerons l’introduction du prochain Briefing Calipia aux robots et à la position d’Nvidia.
